
Od 12. do 21. svibnja 2025. godine, konzorcij projekta SeaClear 2.0 proveo je sveobuhvatnu seriju internih pilotskih testiranja u Hamburgu, Njemačka, koja su kulminirala prvom javnom demontracijom robotskog sustava SeaClear2.0 22. svibnja u Lučkoj upravi Hamburg (Hamburg Port Authority). Iz LARIAT-a su bili uključeni Vicko Prkačin, Matej Jelavić, Anna Panfil, Ante Žile i Ivana Palunko. UNIDU-LARIAT tim radi na razvoju sustava SeaBees i SeaHawk.
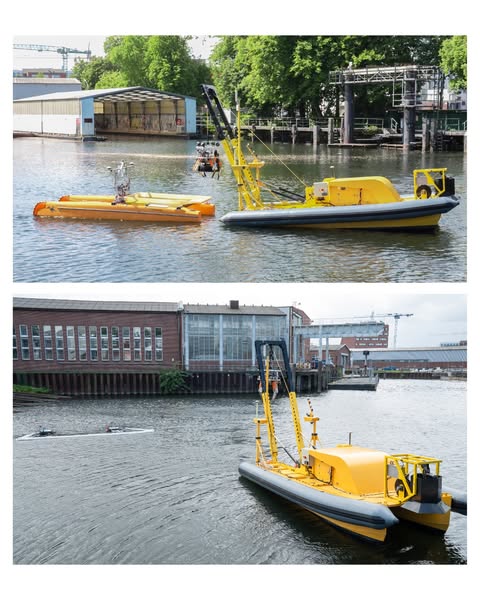
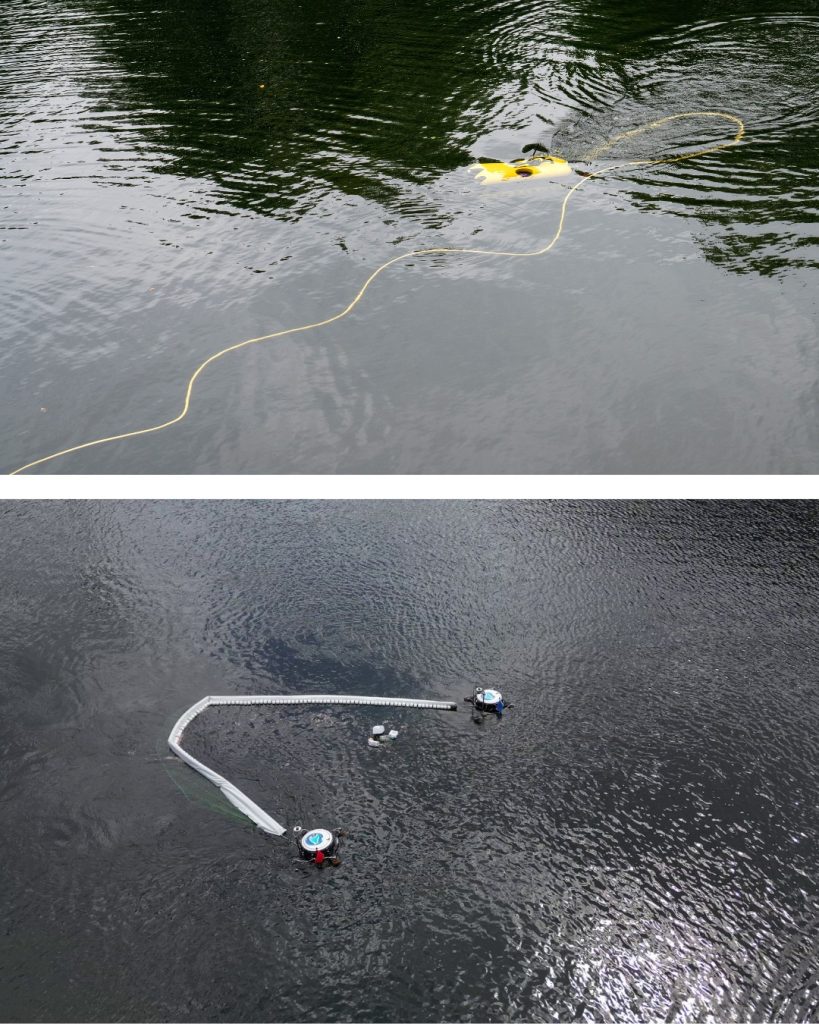
Tijekom deset dana intenzivnih aktivnosti, stručnjaci i tehnički timovi iz partnerskih institucija – uključujući Tehničko sveučilište München, Subsea Tech, Fraunhofer CML, Sveučilište u Dubrovniku, Tehničko sveučilište Cluj-Napoca i Tehničko sveučilište Delft – zajednički su testirali, kalibrirali i usavršavali različite autonomne komponente robotskog sustava. Sustav obuhvaća besposadne površinske brodove (USV) – SeaCat, matični brod i SeaDragon, autonomni tender za odvoz prikupljenog otpada na kopno; sustav za prikupljanje površinskog otpada – SeaBees; besposadnu letjelicu – SeeHawk te pametnu robotsku hvataljku postavljenu na SeaCat zajedno sa kompaktnim i okretnim kabelom povezanim podvodnim robotom (ROV) mini-Tortuga.
Pilot testiranja osigurala su ključnu provjeru funkcionalnosti sustava u operativnim uvjetima okruženja luke Hamburg. Tijekom testiranja provodile su se koordinirane operacije poput autonomnog pristajanja, prepoznavanja i klasifikacije otpada te njegova prikupljanja s morske površine i dna. Posebno su značajna postignuća bila uspješno pristajanje vozila SeaDragon na SeaCat, koordinirano prikupljanje površinskog otpada pomoću SeaBees-a i SeaCat-a, te precizno upravljanje pametnom hvataljkom u autonomnom sakupljanju otpada.
Završni dan testiranja zaokružen je prvom javnom demonstracijom SeaClear 2.0 robotskog sustava, izuzetno važnim događajem kojem su prisustvovali članovi konzorcija i pozvani dionici. Tijekom demonstracije, kompletni robotski sustav SeaClear2.0 – uključujući SeaCat, SeaDragon, SeaBees, SeeHawk i kompaktnu mini-Tortugu – uživo je demonstrirao mogućnosti autonomnog detektiranja, prepoznavanja i sakupljanja morskog otpada. Ovaj događaj predstavlja važan korak prema stvarnoj primjeni sustava i potvrđuje njegovu sposobnost da revolucionira čišćenje podmorja uz pomoć tehnologije umjetne inteligencije.
Financiran u sklopu programa Horizon Europe, projekt SeaClear2.0, koji je nastavak SeaClear 1.0 projekta, odgovara na aktualni problem morskog otpada – gotovo pola milijuna tona plastike svake godine završi u europskim morima. Projekt teži pružiti sveobuhvatno rješenje integrirajući tehnološke inovacije s angažmanom lokalnih zajednica i razvojem politika. U fokusu su robotska percepcija, autonomno upravljanje, ekološka održivost i društvena uključenost.
Konzorcij, koji koordinira Tehničko sveučilište Delft, okuplja 13 partnera iz 9 zemalja, specijaliziranih u različitim područjima: autonomni sustavi, ekologija, pomorsko inženjerstvo, ronilačke operacije, reciklaža otpada, uključivanje javnosti i razvoj politika. Sveučilište u Dubrovniku, pod vodstvom izv. prof. dr. sc. Ivane Palunko (Laboratorij za inteligentne autonomne sustave – LARIAT), daje ključni doprinos razvoju autonomnog sustava upravljanja, ekološkoj procjeni i ekonomskoj održivosti sustava. U projektu uz članove LARIAT-a također sudjeluju i izv. prof. dr. sc. Marijana Pećarević, izv. prof. dr. sc. Ana Bratoš Cetinić, doc. dr. sc. Marina Brailo i doc. dr. sc. Kruno Bonačić s Odjela za primijenjenu ekologiju.
Pilot-testiranja i javna demonstracija u Hamburgu potvrđuju ambiciju projekta SeaClear2.0 da postane predvodnik u autonomnom prikupljanju otpada iz mora te istovremeno osnaže europske napore u stvaranju pametnih i održivih rješenja za zaštitu oceana. Javna demonstracija je odjeknula u Njemačkim medijima kroz više od 12 video priloga i članaka u novinama od RTL, Salt1 itd.
Pratite nas i dalje dok SeaClear2.0 nastavlja svoj put prema čišćim morima i pametnijim tehnologijama.